Muchas personas solo conocen las computadoras personales (PC), o las
computadoras portátiles (laptops), pero para llegar a las computadoras
actuales existieron muchas otras que conoceremos más adelante.
La historia de las computadoras

La historia de las computadoras datan al año 4.000 A.C. donde se crearon
los primeros dispositivos diseñados para la aritmética y las primeras
reglas de cálculo. Alguno de ellos como el ábaco, un importante adelanto en la
historia.
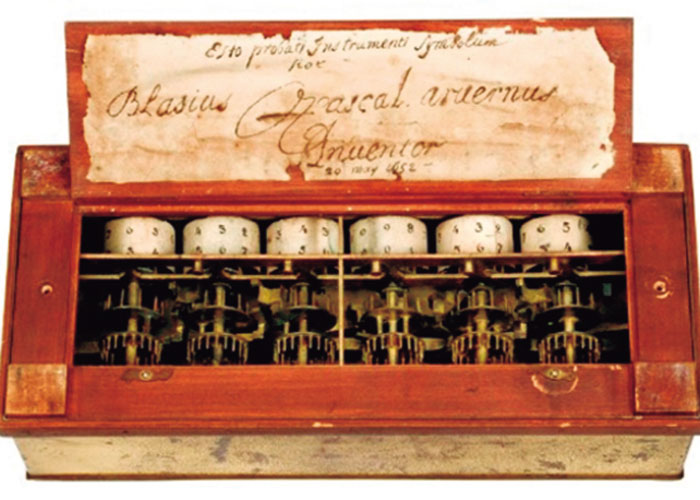
Mucho mas adelante se crearon inventos más sofisticados, como la máquina de
Blaise Pascal (conocida como Máquina de Pascal o Pascalina), creada en 1642.
Esta consistía en una serie de engranajes que permitían realizar operaciones
aritméticas mecánicamente. Al mejorarla, en 1671 Gottfried Leibniz dio
inicio a las primeras calculadoras, primas cercanas del computador.
En 1802 Joseph Marie Jacquard inventó un sistema de tarjetas perforadas que le
permitiría automatizar sus telares y reducir así la necesidad de mano de obra.
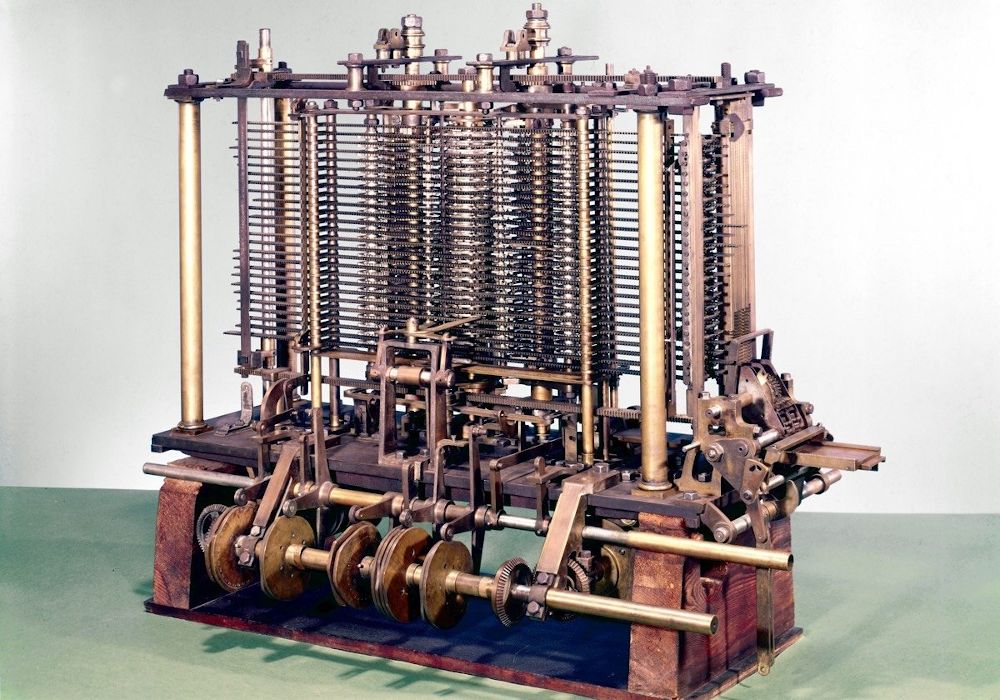
En 1822 fueron la inspiración del inglés Charles Babbage en la creación de una
máquina de cálculo diferencial. Babbage es "el padre de la computadora"
porque en 1834 inventó una máquina analítica.
Primera generación (de 1940 a 1955)
La generación inicial de computadores inicia con la invención de las
primeras máquinas de cálculo automáticas, que podían considerarse propiamente
un “computador”. Respondían a la necesidad durante la Segunda Guerra Mundial
de descifrar códigos secretos enemigos.
Estaban basadas electrónicamente en válvulas y tubos al vacío. Podían
programarse mediante un conjunto de instrucciones simples, que debían
suministrarse al sistema a través de tarjetas perforadas de papel o de cartón,
como en el invento de Babbage.

Segunda generación (de 1956 a 1963)
La segunda generación representó un cambio importante, ya que se
sustituyeron las válvulas de vacío por transistores, permitiendo hacer
las máquinas mucho más pequeñas y reduciendo además su consumo eléctrico.
Estas fueron, también, las primeras máquinas en disponer de un lenguaje
de programación, como el célebre FORTRAN. Así, pronto se hizo obsoleto el
sistema de las tarjetas perforadas.

Tercera generación (de 1964 a 1970)
El salto a la tercera generación estuvo determinado por la invención
de los circuitos integrados: permitieron aumentar a capacidad de
procesamiento de las máquinas y por si fuera poco reducir
sus costos de fabricación.
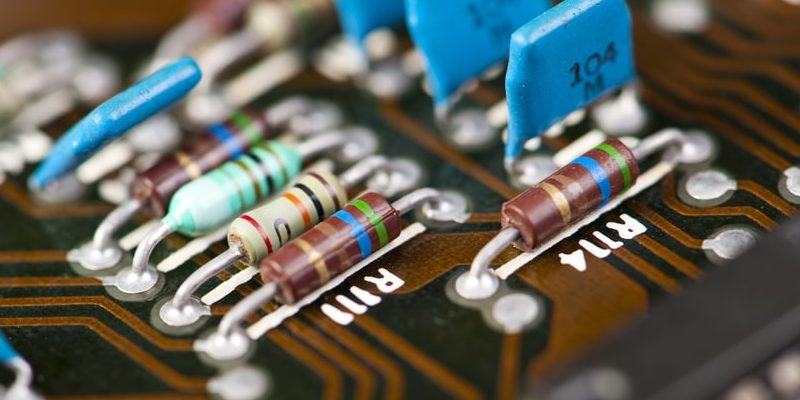
Se trataba de circuitos impresos en pastillas de silicio, con
pequeños transistores y semiconductores incorporados. Este fue el
primer paso hacia la miniaturización de las computadoras.
Cuarta generación (1971 a 1979)
La paulatina integración de los anteriores componentes electrónicos
propició la aparición de los microprocesadores: nuevos circuitos
integrados que reúnen todos los elementos fundamentales de la computadora y
que empezaron pronto a llamarse chips.
Gracias a ellos, las computadoras podían descentralizar sus operaciones
lógico-aritméticas. Por ejemplo, reemplazar la memoria de anillos de silicio
por memoria de chips, fue un paso importante hacia la micro
computarización. A esta generación pertenecieron las primeras
computadoras personales o PC.

Quinta generación (1980 a 1989)
La generación más reciente y vigente hoy en día, presenció la más
enorme diversificación en el ámbito de la computadora de toda su
historia. Se hizo portátil, liviana y cómoda, e incluso expandió sus
fronteras de uso gracias a la posibilidad de las redes
informáticas.
El computador ya ni siquiera necesita estar fijo en una habitación, sino que
puede viajar en nuestros maletines. Nunca antes la velocidad de
procesamiento, la versatilidad y la comodidad convergieron tanto en el mundo
de la computadora, permitiéndole fusionarse con los teléfonos (dando
nacimiento al Smartphone) y con otros muchos formatos diferentes.

Sexta generación (2022 al futuro próximo)
Poco se sabe de la generación de computadores por venir. Los grandes
adelantos en materia de inteligencia artificial, computación cuántica
y algoritmos de aprendizaje prometen un futuro
altamente automatizado y de enormes potenciales industriales. En él
la computadora puede dejar de ser un artefacto que nos acompaña y pasar a
estar dentro de nuestros propios cuerpos.
Clasificación de la computadora
Existen diferentes tipos de computadoras:
·
Según su Tamaño:
(supercomputadoras, macrocomputadoras, minicomputadoras y
microcomputadoras)
·
Según su Tipo de tecnología que utilicen:
(analógicas, digitales, híbridas o cuánticas)
A continuación, tenemos una descripción más detallada de cada uno de
los tipos de computadoras que existen.
Según su tamaño
Super computadoras
También llamadas computadoras de alto rendimiento son un grupo de
computadores organizados en red que funcionan en simultáneo, por lo que
trabajan como si fueran un solo equipo. Esta unión de varios
computadores aumenta la velocidad de los cálculos y la potencia de
funcionamiento, que se mide en petaflops. Un petaflop es una medida de
rendimiento que equivale a 1000 billones de operaciones por segundo. La
computadora de alto rendimiento más potente del mundo es Fugaku, un
equipo fabricado en Japón que alcanza los 415 petaflops, que equivalen a
la potencia de 230.800 consolas PS4 funcionando al mismo tiempo. Las
supercomputadoras se utilizan para hacer complejos cálculos industriales
o científicos. Se utilizan en centros de investigación, organismos
militares, gobiernos o grandes empresas. Otro ejemplo de
supercomputadoras sería Summit, un equipo creado por IBM para el
Departamento de Energía de Estados Unidos que alcanza un rendimiento de
148,6 petaflops.

Macrocomputadoras o mainframes
Las macrocomputadoras, computadoras centrales
o mainframes son un tipo de equipo de gran tamaño que es capaz
de procesar una gran cantidad de datos, pero a una menor escala que una
supercomputadora. Aunque los mainframes suelen confundirse con
las supercomputadoras, se diferencian no solo por su capacidad de
cálculo, sino porque requieren un número limitado de procesadores para
funcionar, mientras que una supercomputadora requiere miles de ellos.
Además, los mainframes están diseñados para cálculos simples,
mientras que las supercomputadoras están hechas para cálculos complejos.
La capacidad y velocidad de procesamiento de
los mainframes varía, ya que actualmente es posible adquirir
este tipo de equipos a pedido, es decir, que el usuario puede pedirle al
fabricante que diseñe el equipo según sus necesidades. Esto significa
que desde una pequeña empresa hasta un banco internacional pueden usar
un mainframe para sus operaciones diarias. Hoy en día,
los mainframes son la opción más viable para las empresas y
organismos que requieren procesar grandes cantidades de datos. Si bien
las computadoras personales actuales pueden ejecutar las mismas tareas
que una macrocomputadora, estas últimas tienen una mayor capacidad de
almacenamiento, velocidad de procesamiento, seguridad y la posibilidad
de ser utilizada por múltiples usuarios. Un ejemplo de uno de
los mainframes más potentes de los últimos años es el z13,
desarrollado por IBM, capaz de procesar 2500 millones de transacciones
diarias. Esto equivale a procesar diariamente las ventas de
100 CyberMondays en Estados Unidos.
Minicomputadoras o Workstation
Las minicomputadoras o workstation (estación de trabajo) son
equipos especializados de alto rendimiento, menos potentes que una
supercomputadora, pero con más capacidad de trabajo que una computadora
personal.
Esta capacidad de memoria, procesamiento de datos y gráficos superiores
a un equipo doméstico las hace óptimas para trabajos relacionados con
ingeniería, diseño gráfico, programación o ciencias.
Las workstation se utilizan también como servidores,
especialmente en pequeñas empresas que no pueden costear una
macrocomputadora. Esto significa que el equipo puede ejecutar diversos
servicios que requieran un procesamiento intensivo de datos, como una
tienda en línea que genere múltiples transacciones diarias. En términos
de estructura física o hardware, una estación de trabajo se ve parecida
a una computadora de escritorio. Sin embargo, la estación de trabajo es
mucho más rápida y puede ejecutar múltiples tareas sin disminuir su
rendimiento. Además, este tipo de computadoras puede funcionar de manera
ininterrumpida y tiene una vida útil más larga que la de una computadora
de escritorio tradicional. Sin embargo, la tendencia actual en el
mercado de la computación apunta a que las workstation van a
desaparecer en el mediano plazo, a medida que las computadoras
personales se vuelvan más potentes. Un ejemplo de minicomputadoras son
las Apexx workstation de alto rendimiento, que se utilizan
especialmente en el mundo del diseño gráfico, la animación 3D y la
creación de videojuegos por su potente capacidad gráfica.

Microcomputadoras
Las microcomputadoras están conformadas por una unidad central (CPU) en
la cual se ubican tanto la memoria como los circuitos de entrada y
salida del equipo, integrados al microprocesador. Esto las hace mucho
más pequeñas y económicas que las estaciones de trabajo, las
macrocomputadoras y las supercomputadoras, que requieren más de un
CPU.
Las microcomputadoras, a su vez, tienen varias categorías:
·
Computadoras de escritorio (PC)
·
Computadoras portátiles
·
Computadoras usables (wearables)
Computadoras de escritorio (PC)
Son equipos de uso doméstico o profesional que requieren una ubicación
fija. Hasta hace poco, se caracterizaban por tener el CPU en una especie
de caja o torre que se instalaba cerca del monitor.

Computadoras portátiles
Son equipos que integran el microprocesador, la pantalla, los puertos
de entrada y salida, el teclado y el trackball o mouse en un
mismo dispositivo que funciona con una batería portátil.
Computadoras usables (wearables)
Llamadas también computadoras corporales, se trata de dispositivos
diseñados para ser utilizado por encima de la ropa. El objetivo es que
el usuario pueda interactuar con el microcomputador y obtener
conectividad a internet sin depender de una computadora portátil o de
escritorio.

Según su tipo
Computadoras analógicas
Son aquellas que están basadas en circuitos de tipo electrónico o
mecánico y miden una magnitud física expresada en números, como peso,
temperatura, presión, velocidad o voltaje. A diferencia de las
computadoras digitales actuales, las computadoras analógicas no
requieren de una memoria de almacenamiento, ya que procesan los datos en
una sola operación y no se guardan en el dispositivo. Muchas
computadoras analógicas se han reemplazado por tecnología digital,
aunque hay industrias que las siguen utilizando. Un ejemplo son las
empresas petroleras, en donde se requiere un monitoreo y comparación
constante de datos como la temperatura. Algunos ejemplos de computadoras
analógicas son las computadoras de los submarinos, los predictores de
mareas, el termostato o la regla de cálculo.

Computadoras digitales
Son un tipo de computadora compuesta por varias unidades con tareas
diferenciadas para recibir, procesar y entregar los datos que han sido
introducidos previamente por el usuario. Estos datos se almacenan en
unidades fundamentales de información, llamadas bits, compuestas por un
dígito binario (cero o uno). Las computadoras digitales requieren ser
programadas antes de ser utilizadas y necesitan tener instalado un
software de acuerdo con el problema que se requiera resolver. Por
ejemplo, si es un dispositivo para procesar transacciones bancarias,
requiere un programa o conjunto de programas específicos para ese tipo
de operaciones. Este tipo de equipos además tienen una capacidad de
almacenamiento para guardar todos los datos procesados y permiten la
conexión a internet. Algunos ejemplos de computadoras digitales son las
estaciones de trabajo, las computadoras portátiles o las
macrocomputadoras.
Computadoras híbridas
Como indica su nombre, se trata de computadoras que combinan tecnología
analógica y digital. Este tipo de dispositivos toma los valores
analógicos y los “traduce” en valores digitalizados. La ventaja de este
tipo de equipos es que combinan las mejores características de cada tipo
de tecnología. Las computadoras analógicas pueden ser rápidas, pero no
son precisas. En cambio, la tecnología digital aporta mayor exactitud en
los cálculos. Un ejemplo de computadora híbrida son los surtidores de
gasolina, que además de medir la cantidad de combustible convierten esa
medida en un precio de venta.

Computadoras cuánticas
Al igual que las computadoras digitales, utilizan código binario para
el procesamiento de datos. En este caso, la unidad fundamental de
información no es un bit (que solo permite ceros o unos), sino un cúbit,
una unidad que puede tener los dos estados binarios al mismo tiempo.
Esto representa un nuevo paradigma en el ámbito de la computación, ya
que es posible crear nuevos algoritmos que una computadora digital no
puede generar. Esto se traduce en nuevas soluciones y aplicaciones que
van desde las investigaciones médicas hasta la comprensión del universo
en escalas que hasta ahora no había sido posible estudiar. Un ejemplo de
este tipo de tecnología es el IBM Q System One, el primer computador
cuántico de uso comercial, diseñado para aplicaciones de negocios e
investigación científica.
:quality(80)/cloudfront-us-east-1.images.arcpublishing.com/lanacionar/FAXVKMYAQZDF3F4VXJMRF7FC5M.jpg)
Tipos de arquitecturas del computador
Arquitectura de Harvard
La arquitectura de Harvard es una arquitectura de
computadora con pistas de almacenamiento y de señal
físicamente separadas para las instrucciones y para los datos. El término
proviene de la computadora Harvard Mark I basada en relés, que
almacenaba las instrucciones sobre cintas perforadas (de 24 bits
de ancho) y los datos en interruptores electromecánicos. Estas primeras
máquinas tenían almacenamiento de datos totalmente contenido dentro
la unidad central de procesamiento, y no proporcionaban acceso al
almacenamiento de instrucciones como datos. Los programas necesitaban ser
cargados por un operador; el procesador no podría arrancar por sí
mismo. En la actualidad la mayoría de los procesadores implementan dichas
vías de señales separadas por motivos de rendimiento, pero en realidad
implementan una arquitectura Harvard modificada, para que puedan
soportar tareas tales como la carga de un programa desde una unidad de disco
como datos para su posterior ejecución.

Arquitectura ADM
Es el método propuesto por TOGAF para desarrollar y administrar el ciclo de
vida de una arquitectura empresarial. Consta de una fase preliminar y otras
8 fases iterativas que se repiten en dependencia de la complejidad o al
surgir nuevos requerimientos. Los cuales son gestionados por una fase
central. Cada fase tiene objetivos claros, pasos bien definidos y se generan
ciertos entregables. Cada fase del ADM tiene entradas y salidas, cada salida
es un entregable, un documento que va al repositorio de arquitectura. A
pesar de que el ADM es genérico para que sea utilizable por cualquier
empresa, el ADM se puede adaptar y extender a las necesidades puntuales de
la compañía.
·
La fase preliminar
·
La fase A
·
La fase B
·
La fase C
·
La fase D
·
La fase E
·
La fase F
·
La fase G
·
La fase H
·
La fase de gestión de requerimientos

Arquitectura orientada a los servicios (SOA)
La arquitectura orientada a los servicios (SOA) es un tipo de diseño de
software que permite reutilizar sus elementos gracias a las interfaces de
servicios que se comunican a través de una red con un lenguaje común. Un
servicio es una unidad autónoma de una o más funciones del software diseñada
para realizar una tarea específica, como recuperar cierta información o
ejecutar una operación. Contiene las integraciones de datos y código que se
necesitan para llevar a cabo una función empresarial completa y
diferenciada. Se puede acceder a él de forma remota e interactuar con él o
actualizarlo de manera independiente. En otras palabras, la SOA integra los
elementos del software que se implementan y se mantienen por separado, y
permite que se comuniquen entre sí y trabajen en conjunto para formar
aplicaciones de software en distintos sistemas.

Arquitectura SPARC
Sparc es una marca registrada de SPARC International Inc, una organización establecida en 1989 para promover la arquitectura Sparc, y proporcionar tests de estabilidad. La implementación de la arquitectura original de 32 bits de Sparc fue inicialmente diseñada en estaciones de trabajo Sun-4 (son una serie de estaciones de trabajo y servidores Unix, lanzados en 1987), reemplazando los sistemas anteriores (Sun-3) basados en la familia de procesadores Motorola 68000. Posteriormente, los procesadores Sparc fueron utilizados en servidores SMP (Symmetric multiprossing donde dos procesadores de características idénticas están conectados a una única memoria central compartida) desarrollados entre otros por Sun y Fujistsu, y diseñados para operaciones de 64 bits.
Su característica distintiva es utilizar
Ventanas de registros:
·
32 registros de "enteros" de 32 bits.
·
16 registros de punto flotante de 64 bits (para el caso de doble precisión)
que se pueden utilizar como 32 registros de 32 bits (para precisión simple).
Modos de direccionamiento:
·
Inmediato, (constantes de 13 bits).
·
Directo, (offset de 13 bits).
·
Indirecto, (registro + offset de 13 bits o registro + registro).
·
Utiliza instrucciones retardadas (saltos, load y store).
Manejo de memoria:
·
Espacio virtual de 4 Gigabytes.
·
Unidad de manejo de memoria (MMU) que trabaja con páginas de tamaño
configurable.

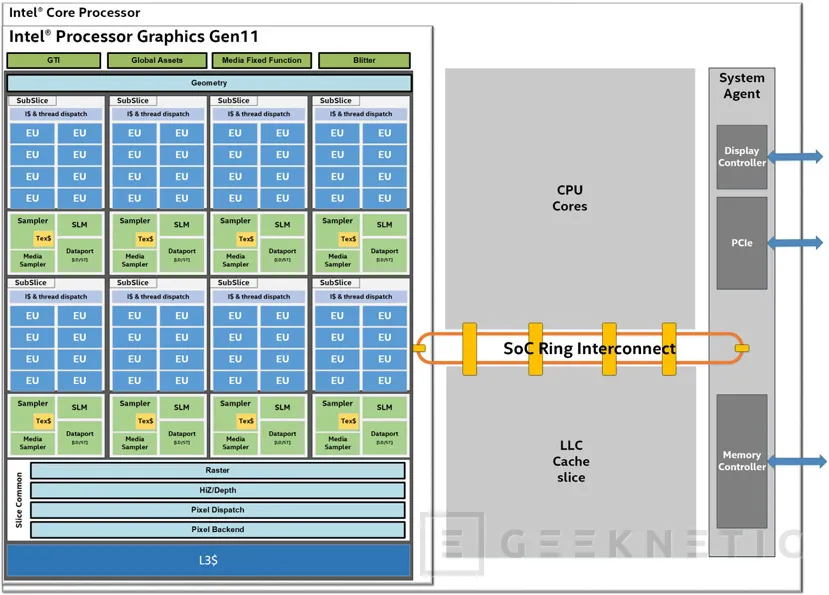
Arquitectura Intel
La arquitectura Intel® 64 proporciona informática de 64 bits en
diseños integrados cuando se combina con software compatible1. La
arquitectura Intel® 64 mejora el rendimiento permitiendo a los sistemas
direccionar más de 4 GB de memoria física y virtual.
·
La arquitectura Intel® 64 es compatible con:
·
Espacio virtual de direcciones de 64 bits
·
Señaladores de 64 bits
·
Registradores para uso general de 64 bits
·
Soporte para enteros de 64 bits
· Hasta un terabyte (TB) de espacio de direcciones de plataforma
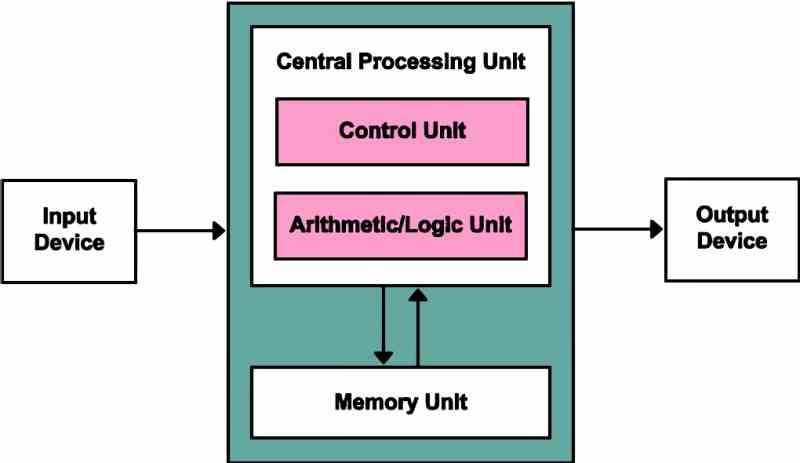
Arquitectura Von Neumann
La arquitectura Von Neumann es una de las dos arquitecturas generales
en la que se basan los ordenadores y es la más utilizada en PC,
consolas, tabletas y teléfonos móviles hoy en día. Dado que todos ello se
encuentra organizados entre ellos usando una serie de tipos de componentes
en común. El símil más claro para entenderlo es el de un coche, no todos los
coches son iguales, pero todos ellos comparten una serie de elementos con
una función e interacción específica, crean un sistema más complejo que es
el coche. De la misma manera, un ser vivo es un conjunto de células
diferenciadas que de forma combinada crean un individuo. Pues bien, en este
caso hablamos de una de las dos organizaciones más comunes para montar un
sistema informático, la otra es la llamada Harvard, pero en PC, consolas y
dispositivos móviles es la arquitectura Von Neumann la que más se
utiliza.
Arquitectura PowerPC
Los procesadores de esta familia fueron producidos por IBM y Freescale
Semiconductor (que era la división de semiconductores y microprocesadores de
Motorola), siendo utilizados principalmente en ordenadores o computadores
Macintosh de Apple Computer hasta el año 2006 y en varios modelos IBM.

Arquitectura ARM
ARM es una arquitectura RISC (Reduced Instruction Set Computer u
Ordenador con un Conjunto Reducido de Instrucciones en español) de 32 y 64
bits desarrollada por ARM Holdings que generalmente se usa en unidades
independientes. Inicialmente ARM se usaba en ordenadores personales por el
año 1987 concebida por Acorn Computers para los Acorn Archimedes que
incluían los ARM de 32 bits. Actualmente ARM pertenece a NVIDIA que
realizó la compra por 40.000 millones de dólares en septiembre de
2020.Actualmente ARM se puede encontrar en dispositivos de electrónica
portátil e integrada, esta arquitectura está en los microprocesadores de
menor tamaño y de bajo consumo, con un coste muy reducido, gracias a la
simplicidad de estos son ideales para aplicaciones que no requieran de mucha
potencia. También podemos encontrar Microprocesadores basados en la
arquitectura ARM en muchos de los móviles actuales del mercado, como
los iPhone con un microprocesador propio llamados AX con arquitectura ARM y
sistema iOS diseñador para esta arquitectura o la gran mayoría de los
móviles Android con microprocesadores diseñados por diferentes ensambladores
y muchos de ellos están basado en esta arquitectura, Qualcomm es
uno de los procesadores que están presentes en los móviles actuales.
:quality(70)/cloudfront-us-east-1.images.arcpublishing.com/metroworldnews/FIC4DL4M5BFVVHHDUKOBRVDXSQ.jpg)
Arquitectura Pipeline
La arquitectura Pipeline consiste en ir transformando un flujo de
datos en un proceso comprendido por varias fases secuenciales, siendo
la entrada de cada una la salida de la anterior, con un almacenamiento
temporal de datos entre procesos.
Entender cómo funciona un pipeline es un paso importante para entender qué
ocurre dentro de un procesador. Este sistema es común verlo en sistemas
operativos multitarea ya que puede ejecutar una serie de procesos de manera
simultánea, los cuales son ejecutados de manera secuencial mediante
un administrador de tareas que aplica distintos tipos de prioridad
y capacidad de procesamiento. Aquí se alterna entre este sistema (el de
tuberías) y los demás.

Sistemas de numeración: conversiones y operaciones
CONVERSIONES DECIMAL A BINARIO
El sistema de numeración más utilizado en la realización de los sistemas digitales es el de base 2, o binario, en el cual existen solamente dos símbolos que son el 0 y el 1, estos a su vez reciben el nombre de bit que es la unidad mínima de expresión, según lo definió Mándalo (1998). Para este caso se utilizará el método de divisiones sucesivas donde se divide el valor decimal para la base, en este caso base 2 hasta que el residuo sea 0 o 1, al final la respuesta vendrá dada desde el último valor hasta el primer valor encontrado de los residuos.

CONVERSIONES DECIMAL A OCTAL
La base de un sistema de números es igual al número de dígitos que se utilizan en el sistema. El sistema de números octales tiene base 8 a razón de que acepta dígitos del 0 al 7. Para la conversión decimal – octal, se utiliza el método octal de divisiones sucesivas, análogo al binario. En lugar de dividir para 2 (base de los números binarios), se divide para 8 (base de números octales), el residuo obvio que sea menor a 8 en orden inverso forma el número octal. Para una cantidad fraccionaria se multiplica para 8 constantemente hasta que el resultado de la multiplicación sea un número entero o hasta llegar a un error de 5%.

CONVERSIONES DECIMAL A HEXADECIMAL
El sistema de numeración hexadecimal, para Mándalo (1998), es el de base 16, es decir, para la representación de las cantidades utiliza 16 símbolos diferentes que son los dígitos del 0 al 9 y las letras del alfabeto de la A a la F. De forma análoga como se dijo anteriormente, se divide la cantidad dada para 16 sucesivamente hasta que esto ya no sea posible (residuo menor a 16). En una cantidad fraccionaria se multiplica para 16 sucesivamente hasta que el resultado de la multiplicación sea un número entero o hasta llegar a un error de 5%. La lectura es desde la parte superior.


CONVERSIONES BINARIO A DECIMAL
Es muy importante resaltar que los dos dígitos (0 y 1) tienen distinto valor, dependiendo de la posición ocupada que viene determinada por una potencia de base dos. Tal y como ocurre en el sistema decimal, la base de la potencia coincide con la cantidad de dígitos utilizados para representar los números. Para esta conversión se utilizará el método de multiplicaciones sucesivas, por ende, a cada dato binario se le colocará un índice que irá desde el 0 e irá aumentando


CONVERSIONES BINARIO A OCTAL
El sistema octal, es decir, el sistema en base 8, puede ser considerado como binario abreviado, en el sentido de que la conversión de estos a binario y viceversa es prácticamente inmediata a simple vista usando el método de sustitución directa. La conversión de enteros binarios a enteros octales es simplemente la operación inversa del proceso anterior. Cada digito octal se representa mediante un numero binario de 3 dígitos Cuando no se completan se coloca un cero o dos ceros


CONVERSIONES BINARIO A HEXADECIMAL
Cada digito octal se representa mediante un numero binario de 4 dígitos
Cuando no se completan se coloca los ceros necesarios

CONVERSIONES HEXADECIMAL A DECIMAL

CONVERSIONES HEXADECIMAL A BINARIO

CONVERSIONES HEXADECIMAL A OCTAL
3 dígitos binarios representan 1 digito octal 4 dígitos binarios representan 1 digito hexadecimal

CONVERSIONES OCTAL A BINARIO
3 dígitos binarios representan 1 digito octal

CONVERSIONES OCTAL A DECIMAL

CONVERSIONES OCTAL A HEXADECIMAL
3 dígitos binarios representan 1 digito octal 4 dígitos binarios
representan 1 digito hexadecimal

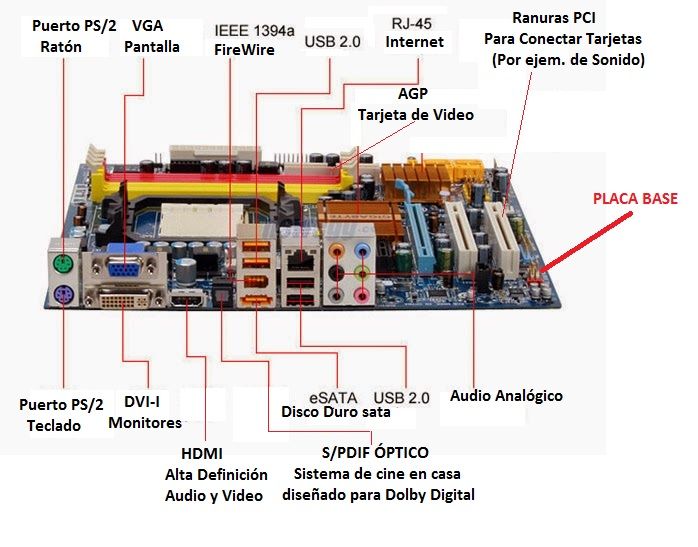
¿Qué es la placa madre?
La placa madre es la tarjeta de circuito integrado principal del sistema informático. En computación, la placa madre, placa principal, placa base o tarjeta madre (del inglés: motherboard) es la tarjeta de circuito integrado principal del sistema informático, a la que se acoplan los demás componentes que constituyen el computador

Funciones de la placa madre
Podría decirse que, la placa madre, es el sistema nervioso central del
computador. La placa base es el lugar de integración y contacto entre los
diversos componentes del sistema informático. Se trata del módulo
principal y más grande, en donde se distribuyen los datos que surgen del
microprocesador y se transmiten las instrucciones tanto a la memoria, los
sistemas de almacenamiento de información, o los periféricos. Podría
decirse que es el sistema nervioso central del computador, el lugar en
donde sus operaciones mínimas e indispensables se llevan a cabo.
Tipos de placa madre
Las placas monoprocesadoras albergan a un único microprocesador instalado
a la vez. Suelen clasificarse las placas base atendiendo a la cantidad de
microprocesadores que puedan albergar a la vez.:
·
Placas base monoprocesadoras. Aquellas que están dispuestas para albergar
a un único microprocesador instalado a la vez.
·
Placas base multiprocesadoras. Aquellas que, por el contrario, pueden
tener instalados varios microprocesadores (2, 4 e incluso 8 a la vez),
acumulando así su potencia conjunta.
Características de la placa madre
·
Factor de forma
–Se usa con frecuencia para clasificar las placas madre en base al
tipo geométrico para la disposición, dimensiones y los requerimientos
eléctricos de la placa madre.
·
Chipset
(el cerebro de la placa madre) – Se define como un circuito electrónico
cuya función es coordinar la transferencia de datos entre los distintos
componentes de la computadora. Se encuentra integrado a la placa madre.
·
Se divide generalmente en dos secciones diferentes:
o
Puente norte (northbridge). Interconecta la memoria RAM, el
microprocesador y la unidad de procesamiento gráfico.
o
Puente sur (southbridge). Interconecta los periféricos y los dispositivos
de almacenamiento secundario, locales o externos.
·
Zócalo del CPU –Estructura donde se ubica el procesador al insertarlo a la place madre se
denomina como zócalo del procesador. Los hay de ranura con un conector
rectangular y otro cuadrado con otros varios conectores pequeños para
insertar directamente el procesador.
·
Conectores de entrada y salida –
Existen varios conectores, tanto de entrada como de salida, que según sea
la versión de este elemento o qué tan reciente haya salido al mercado, va
a disponer o no de determinados elementos.
· Plataforma – Según sea la plataforma (como AMD o Intel) tendrá diferentes especificaciones.
· Otros componentes. La placa base también cuenta con
otros elementos como el reloj del sistema, la BIOS preprogramada de fábrica,
el bus interno o frontal del Chipset (en desuso) y la CMOS, una pequeña forma
de memoria para preservar los datos mínimos del equipo, como su configuración,
la hora y la fecha.
Cómo saber cuál es mi placa madre
El método más tradicional para averiguar cuál es la placa base de un
computador consiste en abrir la carcasa del CPU y simplemente mirar la
tarjeta más grande en la cual se insertan todas las demás.
Pero existen métodos más simples y menos invasivos, sobre todo si no somos
expertos en la materia y nos asusta poner en riesgo el sistema, o si nuestro
computador es un laptop u otro formato de pequeño tamaño que no resultaría
sencillo desarmar. Hay dos formas de hacerlo sin recurrir al destornillador:
•
Con Windows 10. Se emplea una herramienta nativa del Sistema Operativo
llamada msinfo32. Deberemos presionar Windows + R para abrir el comando
ejecutar, escribir “msinfo32” y presionar aceptar. Se abrirá una ventana en
la que figurará un “Resumen del sistema”. Bastará con hacer clic en él para
acceder a la
información que buscamos.
•
Con otras aplicaciones. Existen programas de terceros como CPU-Z que pueden
servirnos para investigar en los contenidos de nuestro computador y que a
menudo tienen versiones de descarga gratuita.
Tipos de placa madre
Hay varios tipos de placa madre entre los cuales están:
•
Placa AT
– Se usa por parte de IBM AT INC y se creó en 1984. Es una tarjeta de gran
tamaño si se piensa en las unidades de disco más avanzadas. Una de sus
desventajas es que puede ocasionar errores a través de su conector con la fuente de alimentación.
•
Placa Baby AT
– Se diseño en 1985 y aunque es de un tamaño menor a la AT, la
funcionalidad es casi la misma. Por su profundidad posibilitaba una mayor
facilidad para que se introduzcan cajas más pequeñas y por eso tuvo éxito en
el mercado.
•
Placa ATX
– Se creó en 1995 por Intel. Es un modelo que logró superar las desventajas de los anteriores. Es una placa en la que se sitúan los
puertos que más se usan de manera opuesta al de los slots de aplicación. En
otras palabras, numerosas tarjetas se pudieron introducir en la placa madre.
•
Placa micro AXT
– Es un formato más reducido para la placa madre. Es muy pequeña y sólo
cuenta con espacio para 1 o 2 slots AGP y/o PCI. Por esa razón se añaden
puertos USB o FireWire. Es la más moderna en la actualidad.
¿Qué es el factor de forma de la placa base?
La placa base es el componente principal, según su función, de la
estructura interna de todos los ordenadores. Es la principal responsable de
la interacción de todos los elementos del ordenador, como la CPU, la RAM, el
almacenamiento, la tarjeta gráfica y la E/S, entre otros.
Es extremadamente importante reconocer sus capacidades, limitaciones, así
como las principales características que contiene para no reprimir el
potencial de cualquier otra pieza dentro del PC. Otro elemento clave es el
factor de forma (tamaño físico exterior y forma) que también debe ser
considerado para la aplicación de la computadora de acuerdo con el campo
donde se va a utilizar.
Las placas base se caracterizan siempre por su chipset, el tipo de zócalo
del procesador y su factor de forma.
Tipos de factores de forma de las placas base
![]() Factor de forma ATX (Advanced Technology Extended)
Factor de forma ATX (Advanced Technology Extended)
Diseñado como una evolución del
Factor de forma Baby ATEl sistema ATX supone un profundo cambio en la arquitectura de la placa base
y otros componentes, como la carcasa y la fuente de alimentación.
Dentro de la placa base hay cambios significativos como la ubicación del
zócalo de la CPU, que ahora se sitúa cerca de la fuente de alimentación,
permitiendo así que el flujo de aire provocado por el ventilador de la
fuente no se vea interferido por ningún elemento como ocurría con la
tecnología Baby AT.
Otro cambio fue la conexión entre la fuente de alimentación. Que ahora es
un solo conector, a diferencia de la AT que eran dos. Algunas de las mejoras
más importantes para ATX y los beneficios son:
•
Puertos de entrada y salida integrados
•
Ranuras de expansión sin interferencias
•
Control de inicio por software
•
3 vol. desde la fuente (reduce el coste del hardware, el consumo de energía
y el calor)
•
Un mejor flujo de aire
•
Menor interferencia en el acceso a las bahías de unidades.
Las dimensiones de la placa base ATX son de 12 × 13 pulgadas. Una variación del ATX es el Mini ATX, que es esencialmente una versión de
tamaño reducido del ATX, pero más reducido en cuanto a su forma, sus medidas
son 11,2 × 8,2 pulgadas.
Este factor de forma es el más utilizado hoy en día, especialmente en los
ordenadores de sobremesa, y después de que esta tecnología fuera lanzada
varios otros factores se basaron en ella. Por ejemplo, Mini-ITX, Mini-ATX,
Micro-ATX, Nano ITX y Pico-ITX.
 Forma Micro ATX
Forma Micro ATX
Es una evolución de ATX. Sus medidas son de 9,6 × 9,6 pulgadas. La
Micro-ATX admite hasta cuatro ranuras de expansión que pueden combinarse
libremente con ISA, PCI, PCI / ISA compartida y AGP. Los orificios de
montaje han cambiado con respecto a la ATX estándar, ya que las medidas son
diferentes, pero también son compatibles con la mayoría de los gabinetes
ATX.
Este tipo de factor de forma de la placa base es compatible con los
procesadores Intel y AMD. Se utiliza comúnmente en los ordenadores de
sobremesa de factor de forma pequeño.
 Forma Micro-ITX
Forma Micro-ITX
Mini ITX es un formato de placa base de bajo consumo de 6,7 × 6,7 pulgadas.
Sus dimensiones son el factor más característico de este tipo de factor de
forma. Aunque este tipo de placas base se diseñó con el objetivo de
potenciar los equipos de bajo consumo, en la actualidad no existen límites y
han crecido a pasos agigantados en cuanto a prestaciones.
Desde que se introdujeron las Mini-ITX se han expandido en todo tipo de
aplicaciones, gracias a su factor estándar abierto. El Mini-ITX es un
formato estándar para todo tipo de equipos, como ordenadores integrados en
vehículos, aplicaciones industriales e IoT. El Mini-ITX es el primer sistema
estándar de formato reducido que se populariza, llegando a todo tipo de
proyectos y a cualquier equipo donde sea necesario.
 Forma Micro Nano-ITX
Forma Micro Nano-ITX
La Nano-ITX es otro tipo de factor de forma de placa base, que mide 4,7 ×
4,7 pulgadas. Las NanoITX son placas totalmente integradas diseñadas para
consumir muy poca energía. Este tipo de placa base se puede utilizar en
muchas aplicaciones, pero fue especialmente diseñada para el entretenimiento
inteligente, como PVRs, centros multimedia, televisores inteligentes,
dispositivos en el vehículo, y más.
 Forma Micro Pico-ITX
Forma Micro Pico-ITX
La Pico-ITX es el tipo de factor de forma de placa base más pequeño de esta
lista. Sus medidas son de 3,9 × 2,8 pulgadas y es un 75% más pequeña que la
Mini-ITX. Esta placa base fue diseñada y desarrollada por VIA, para abrir la
innovación a dispositivos IoT más pequeños e inteligentes.
La Pico-ITX, con una plataforma basada en x86 y una placa de bajo consumo,
es una gran opción para aplicaciones de sistemas integrados, como la
automatización industrial, los ordenadores de a bordo, la señalización
digital, etc.
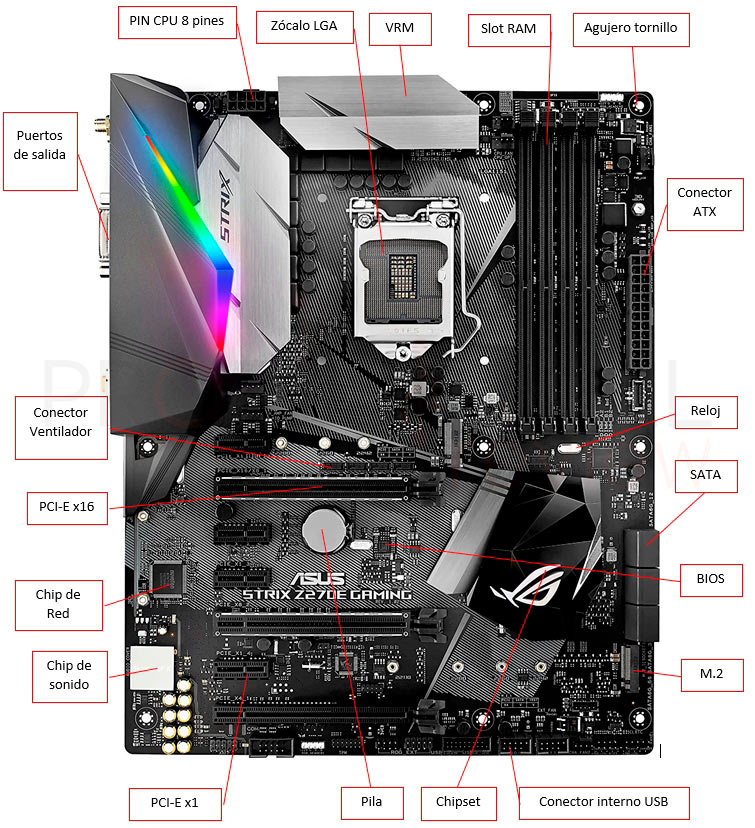
Partes o componentes de la placa madre
•
Conectores de alimentación
– Los encargados de brindar energía al ordenador gracias a una fuente de poder. Transmite a su vez la energía a los dispositivos ópticos y de
almacenamiento masivo.
•
Zócalo de CPU
– Es un conector encargado de recibir el procesador del PC y también de
conectarlo con lo que resta del equipo.
•
Ranuras de memoria RAM
–
Es un conector que está entre 2 y 4 unidades. Se diseña para que se inserten
las tarjetas de memoria al computador.
•
Ranuras de expansión
– Se las orienta para recibir varios tipos de tarjetas, según lo que se
busque adicionar al computador.
•
Bus
– Es un conectar que asume la conexión del microprocesador con el chipset.
De todos modos, ha caído en desuso por el Hyper Transport y el Quickpath.
•
Bus de memoria
– Conecta al chipset con la memoria RAM.
•
Bus de expansión
– Conecta el microprocesador con los conectores de entrada y de salida,
además de las ranuras de expansión.
•
Conectores de entrada y salida
– Permiten que el equipo se mantenga conectado con dispositivos externos, es decir
para conectar periféricos de entrada y periféricos de salida.
Algunos de ellos son: USB, puerto paralelo, P2S, conectores RJ45, DVI, HDMI,
VGA, IDE o ATA.
Tipos de buses
·
Bus de datos
·
Bus de control
·
Bus de Dirección

¿Qué son los buses datos?
Un bus de datos es el término empleado en la informática
para referirse a las conexiones físicas o canales que permiten la
circulación de los datos que genera o utiliza un sistema informático para
operar. Generalmente, se le llama buses a todo el cableado y apartado
físico que conecta los componentes de una computadora, lo que además de
permitir que sus distintas partes se encuentren unidas, minimiza la cantidad de
rutas de comunicación que se necesitan entre ellos.

¿Qué son los buses de control?
Un bus de control es un bus de computadora que es utilizado
por la CPU para comunicarse con dispositivos contenidos dentro de la
computadora. Esto ocurre a través de conexiones físicas como cables o circuitos
impresos.
¿Qué son los buses de direcciones?
Un bus de direcciones es una arquitectura de bus de
computadora utilizada para transferir datos entre dispositivos identificados
por la dirección de hardware de la memoria física (la dirección física), que se
almacena en forma de números binarios para permitir que el bus de datos acceda
al almacenamiento de memoria.
Procesadores
¿Qué es un procesador?
El procesador es el cerebro del sistema, justamente procesa
todo lo que ocurre en la PC y ejecuta todas las acciones que existen. Cuanto
más rápido sea el procesador que tiene una computadora, más rápidamente se
ejecutarán las órdenes que se le den a la máquina. Este componente es
parte del hardware de muchos dispositivos, no solo de tu computadora.
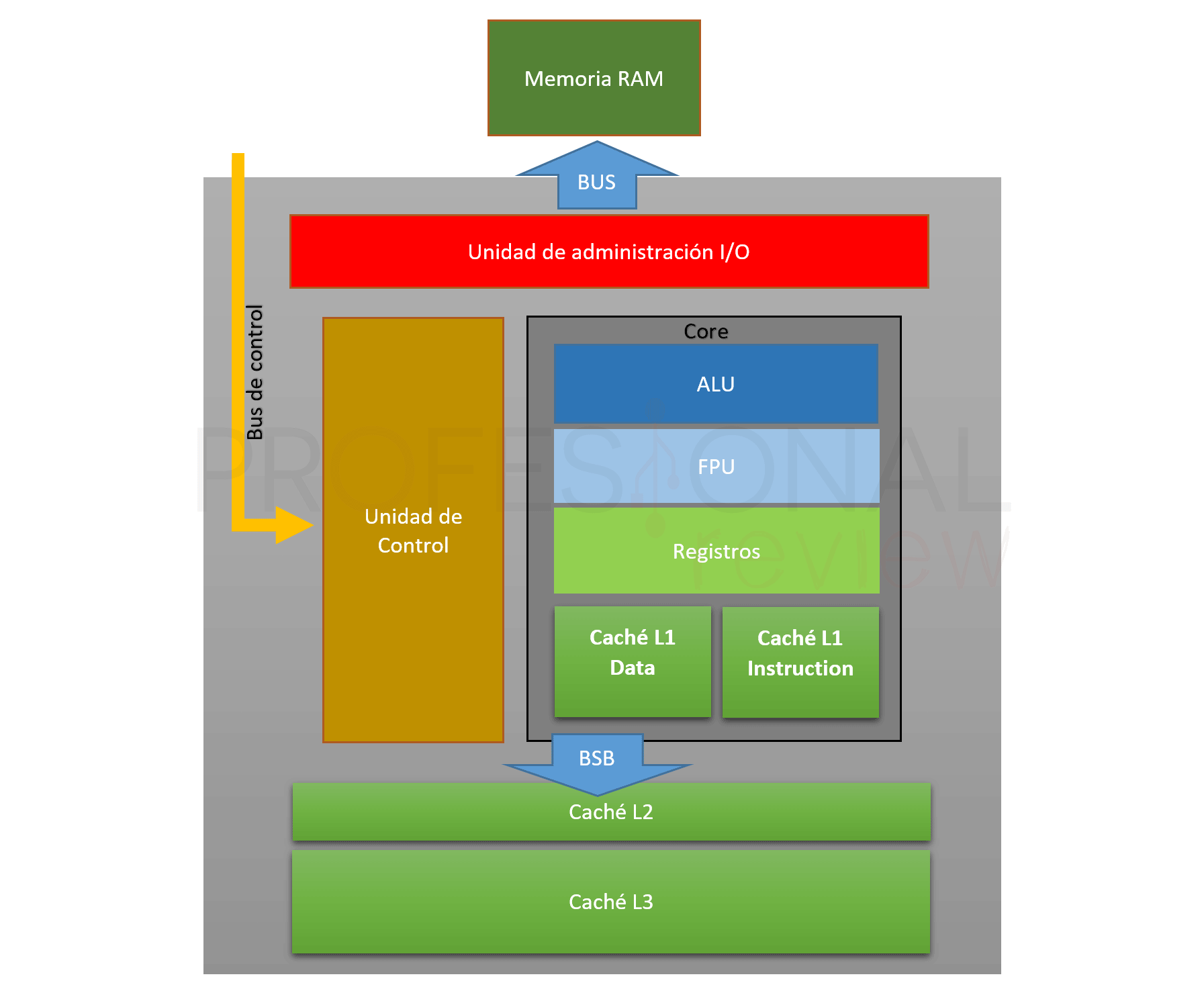
Componentes de un procesador
Un procesador está compuesto de:
·
Núcleos
·
Caché
·
Controlador de memoria
·
Tarjeta gráfica
·
Otros elementos auxiliares
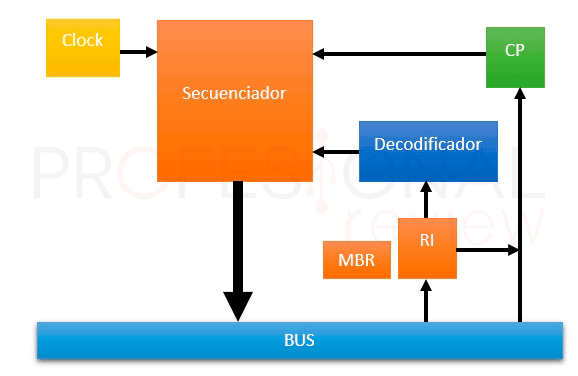
Funcionamiento de un procesador
El funcionamiento del procesador está determinado por
un reloj que sincroniza todos los bloques funcionales y se encarga de que
todo marche como debe ser o está programado para ser. Y tiene las siguientes etapas:
·
Leer la instrucción de la memoria
·
Buscar los datos
·
Realizar la operación
·
Pasar a la siguiente instrucción
Memora RAM y cache
En informática, la memoria RAM (acrónimo
de Random Access Memory, o Memoria de Acceso Aleatorio) es un
tipo de memoria operativa de los computadores y sistemas
informáticos, adonde va a ejecutarse la mayor parte del software: el propio
sistema operativo, el software de aplicación y otros programas semejantes.
Tipos de memoria RAM
Hoy en día existen dos tipos de memoria
RAM contrapuestos:
·
SRAM. Acrónimo de Static Random Access Memory (o
sea: Memoria Estática de Acceso Aleatorio), designa un tipo de
memoria que se sustenta en semiconductores y capaz de mantener los datos sin
necesidad de circuitos de refrescamiento, siempre y cuando se mantenga
alimentada. De este tipo son las memorias NVRAM (Non-volatile Random Access Memory,
o RAM no volátil) y MRAM (Magnetoresistive Random Access Memory,
o RAM magnética).
·
DRAM. Acrónimo de Dynamic Random Access Memory (o
sea: Memoria Dinámica de Acceso Aleatorio), basa su tecnología en
condensadores, que al perder carga progresivamente, requieren de un circuido de
refresco que revisa su carga y la repone. Fue inventada a finales de 1960 y es
el tipo más empleado actualmente, pues permite crear módulos de enorme densidad
de posiciones y alta velocidad de recuperación. De este tipo son las memorias
DRAM Asincrónica y SDRAM (Synchronous Dynamic Random Access Memory,
o DRAM sincrónica).
¿Qué es la memoria cache?
La definición de memoria caché en informática nos
dice que es uno de los recursos con los que cuenta una CPU (Unidad Central de
Procesamiento) para almacenar temporalmente datos recientemente procesados en
una memoria auxiliar. Se trata de lo que se conoce como una memoria estática de
acceso aleatorio (SRAM) muy rápida y colocada cerca de la CPU.
La principal función de la memoria caché es
almacenar datos o instrucciones que la CPU va a necesitar en un futuro
inmediato, de manera que se gana velocidad en la ejecución de procesos, evitando
que la CPU tenga que esperar y aumentando así el rendimiento del equipo.
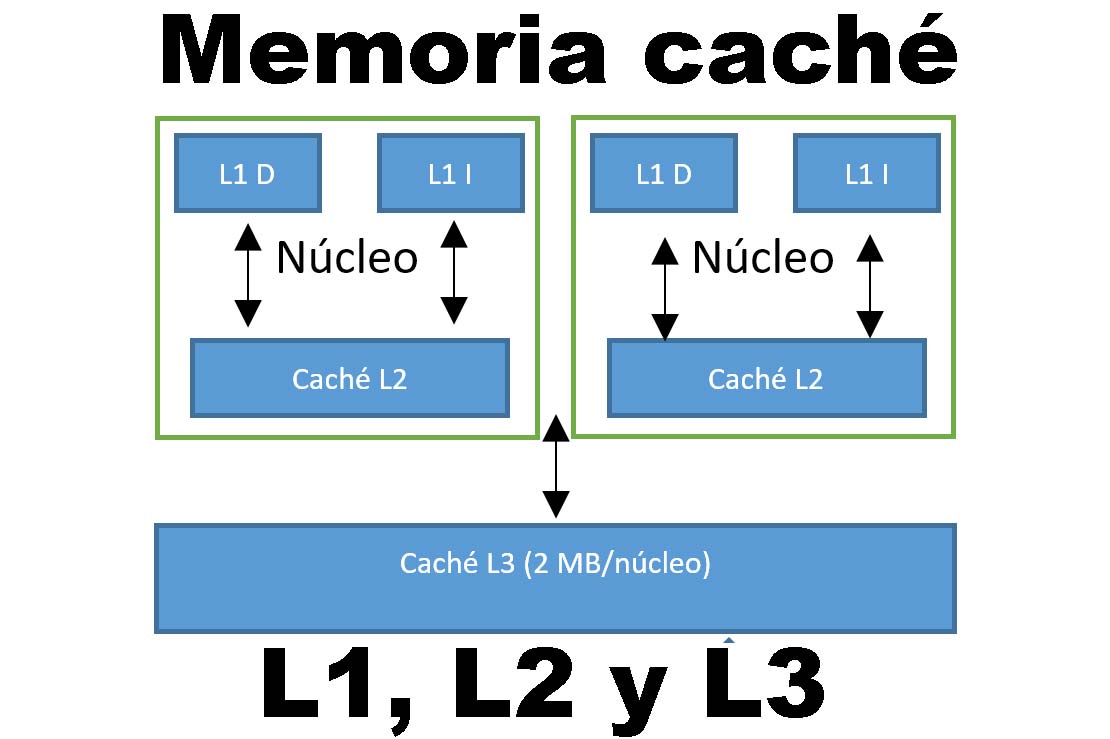
Niveles de la memoria cache
En cuando a los
niveles, actualmente, en los procesadores la memoria caché tiene
varios niveles:
·
Caché
L1: Es la memoria caché más pequeña y rápida. En ella se almacenan los datos
que el procesador va a necesitar para realizar la mayoría de las operaciones,
con un propósito doble: instrucciones y datos. Las instrucciones son las
operaciones que se realizarán en el procesador y los datos son la información
que se debe procesar. El tamaño habitual es de 256 KB, aunque hay procesadores
donde alcanza los 512 KB e incluso 1 MB.
·
Caché
L2: Algo más lenta y grande que la L1, su capacidad suele estar entre los 256
KB y los 8 MB.
·
Caché
L3: Más lenta pero más grande que las dos anteriores, con capacidad entre los 4
y los 50 MB.
BIOS
El sistema básico de entrada y salida, o BIOS (Basic
Input Output System), es el primer programa informático que se ejecuta al
encender el ordenador. Se almacena en un chip que suele estar unido a la placa
base.
La BIOS se encarga de inicializar y probar todo el hardware
del sistema informático. Una vez que la BIOS ha terminado sus tareas y ha
determinado que el sistema informático funciona correctamente, pasa el
control al sistema operativo, que carga y ejecuta el programa informático que
se utilizó para arrancar el ordenador en primer lugar.
La BIOS también tiene otras funciones. Almacena
información sobre la configuración del sistema, incluyendo el tipo de
ordenador, la cantidad de memoria instalada, el tipo de disco duro y la
cantidad de espacio en él, y cualquier otro periférico al que esté conectado el
ordenador, como una impresora, un escáner, un módem de Internet, un dispositivo
USB o una tarjeta de red.

Puertos de entrada y salida
Los puertos de E/S son puertos de comunicación, que se
encargan de transmitir una serie de datos entre dos extremos y todos ellos
cumplen con las siguientes características:
·
Un
reloj: esta señal
marca cada cuánto se realiza una transferencia de datos.
·
Pines
de datos: transmiten
la información de un lado a otro y los hay de recepción, de envío y Full Dúplex
que permiten que los datos vayan en un sentido u otro. Si existen varios pines
de datos en la interfaz del puerto diremos que se trata de un puerto paralelo y
si hay pocos entonces afirmaremos que es un puerto serie.
Puertos de E/S en la actualidad
·
USB
·
Thunderbolt
·
HDMI
·
DisplayPort
·
RJ45 O Ethernete
·
Minijack de 3.5 mm y conectores TRS
·
S/PDIF para audio digital
Puertos de E/S que han dejado de existir
·
RS-232 O DB9
·
Paralelo o Centronics
·
VGA
·
DVI
·
S-VIDEO
·
PS/2
Almacenamiento secundario y Respaldo
¿Qué es respaldo?
La palabra «Backup» significa respaldo, siendo común el uso
de este término dentro del ámbito informático. El respaldo de información es la
copia de los datos importantes de un dispositivo primario en uno o varios
dispositivos secundarios, ello para que en caso de que el primer dispositivo
sufra una avería electromecánica o un error en su estructura lógica, sea
posible contar con la mayor parte de la información necesaria para continuar
con las actividades rutinarias y evitar pérdida generalizada de datos.

¿Qué es el almacenamiento secundario?
La tecnología de almacenamiento secundario se refiere a
cualquier tipo dispositivo de almacenamiento no volátil (a diferencia de la
memoria RAM que es volátil), ya sea interno o externo al computador. Puede ser
cualquier dispositivo de almacenamiento del alterno al almacenamiento primario
que permita el almacenar datos de forma permanente.
Tipos de almacenamiento secundario
La tecnología de almacenamiento secundario se clasifica en:
·
Almacenamiento óptico
·
Almacenamiento magnético
·
Almacenamiento magneto-óptico (híbrido)
·
Almacenamiento electrónico (Memoria Flash,SSD)
Almacenamiento óptico
En los discos ópticos la información se guarda de una forma
secuencial en una espira que comienza en el centro del disco. Además de la
capacidad, estos discos presentan ventajas como la fiabilidad, resistencia a
los arañazos, la suciedad y a los efectos de los campos magnéticos.
·
BLU-RAY
·
DVD
·
CD
·
CD-ROM
·
CD-RW

Almacenamiento magnético
Los dispositivos de almacenamiento magnéticos utilizan
magnetismo para almacenar datos. La información se lee o escribe usando una
cabeza que actúa similar a un lápiz óptico reproductor de discos, también se
conocen como “dispositivos de acceso aleatorio” porque la información se
organiza en círculos concéntricos sobre la superficie de los discos. Esto
permite que la cabeza pueda ir a cualquier parte del disco y recuperar o
almacenar información de rápidamente. Los medios magnéticos se componen de una
capa delgada que puede grabar una señal magnética soportada por una película de
respaldo un poco más gruesa. La capa superior se compone de un pigmento
magnético. La cubierta superior mantiene las partículas magnéticas juntas. La
película de respaldo soporta la capa superior magnética y reduce la fricción y
la distorsión.
·
DISCO DURO
·
CINTAS MAGNETICAS
·
DISCO DE 3 ½

Almacenamiento Magneto-óptico
Es un tipo de disco óptico capaz de escribir y reescribir
los datos sobre sí. Al igual que un CD-RW, puede ser utilizado tanto para
almacenar datos informáticos como pistas de audio. La grabación magneto-óptica
es un sistema combinado que graba la información de forma magnética bajo la
incidencia de un rayo láser, y la reproduce por medios ópticos.

Almacenamiento Eléctrico o Flash
Son una evolución de las memorias EEPROM que permiten que
múltiples posiciones de memoria sean escritas o borradas en una misma operación
mediante impulsos eléctricos. Por esta razón, este tipo de memorias funcionan a
velocidades muy superiores cuando los sistemas emplean lectura y escritura al
mismo tiempo.
·
UNIDAD DE DISCO SSD
·
TARJETA DE MEMORIA FLASH
Dispositivos de entrada y salida
Los dispositivos de entrada y salida o unidades de
entrada/salida son los equipos físicos conectados a la computadora. Estos
dispositivos permiten comunicar información entre el usuario y la computadora o
manejar un soporte de información.
Dispositivos de entrada
Los dispositivos de
entrada son aquellos equipos encargados de introducir datos en la memoria
central de la computadora para su tratamiento. A través de ellos se transforma
la información de entrada en señales eléctricas.
Ejemplos de
dispositivos de entrada podemos mencionar los siguientes:
Teclado
Ratón o mouse
Lectora de código
de barras
Unidad de disco
óptico
Escáner o scanner
Palanca de control
para juegos o joystick
Micrófono
WebCam

Dispositivos de salida
Los dispositivos de
salida son los equipos que presentan la información al usuario de forma
comprensible, ya sea a través de imágenes, texto, sonidos o táctil. Estos
realizan la función de extraer datos de la memoria central hacia el exterior.
Como ejemplos de
dispositivos de salida encontramos:
·
Pantalla
·
Altavoz
·
Impresora

Dispositivos mixtos
Los dispositivos de
entrada y salida o dispositivos mixtos permiten la introducción y extracción de
datos en la memoria central.
Son ejemplos de
dispositivos mixtos los siguientes:
·
Pantalla
táctil
·
Impresoras
multifunción
·
Teclado
MIDI (Musical Instrument Digital Interface)

FireWire
¿Qué es un cable FireWire y para qué sirve?
FireWire también es conocido como IEEE 1394, pero no es un
cable que hoy en día se vea mucho. Se trata de un cable que fue muy popular en
los años 90, siendo el estándar que competía con USB por mucho tiempo. FireWire proporcionaba
velocidades de conexión mayores a USB 2.0, pero no tanto como el Thunderbolt
actual. El conector para IEEE 1394, puede encontrarse en discos duros externos
y cámaras digitales muy antiguas.

Controladores o drivers
¿Qué son los drivers?
Un driver o controlador no es más que es un software (programa)
para la computadora, compuesto por varias líneas de código que le asignan una
función específica, y que en este caso es la de permitir que el Sistema
Operativo, ya sea Windows, Linux, Mac OS, o cualquier otro; se comunique con el
hardware o aquellos dispositivos que componen la estructura física del
computador.

Las redes inalámbricas
Las redes inalámbricas son conexiones que se dan por
medio de ondas electromagnéticas, permitiendo la transmisión y recepción de
información, prescindiendo de una conexión física (cableado). Esto hace posible
que los dispositivos remotos se conecten fácilmente mientras se encuentren
dentro del área de la red. Además, las redes inalámbricas permiten que
varios terminales puedan establecer comunicación sin necesidad de conexión
cableada.
Dependiendo del medio, las redes inalámbricas tendrán una
característica u otra según el rango de frecuencia utilizado para transmitir.
La transmisión puede variar entre las que se nombran a continuación:
·
Ondas de
radio: esta transmisión utiliza una frecuencia de ondas electromagnéticas
omnidireccionales. Además, no necesita de antenas parabólicas.
·
Microondas
por satélite: Enlaza dos o más estaciones terrestres (estaciones base). En
este caso, el satélite recibe la señal en una banda de frecuencia, la amplifica
y la retransmite en otra banda.
·
Infrarrojos: enlaza
transmisores y receptores que modulan la luz infrarroja no coherente. Deben
estar alineados directamente o con una reflexión en una superficie.
·
Microondas
terrestres: utilizada en antenas parabólicas, tiene una cobertura de
kilómetros, pero con el inconveniente de que el emisor y el receptor deben
estar perfectamente alineados.
Tipos de redes inalámbricas
Existen diferentes tipos de redes inalámbricas, los
cuales varían según su alcance de cobertura. A continuación, se detallan cuáles
son:
·
Wireless Personal Area Network (WPAN): La red
inalámbrica de área personal, son redes que cubren distancias de hasta 10
metros. Estas se emplean comúnmente para que un usuario pueda conectar sus
dispositivos de uso personal a una red.
·
Wireless Local Area Network (WLAN): Una red
inalámbrica de área local es un tipo de red que cubre distancias de hasta
100 metros. Son implementadas bajo protocolos wifi o bluetooth, y utilizadas
para establecer una red de menor coste, evitando los de una conexión cableada.
·
Wireless Metropolitan Area Network (WMAN): La red
inalámbrica de área metropolitana es una red de la que su cobertura
comúnmente puede abarcar unos 50 Km. Como puede intuirse, estas redes se
establecen para dar cobertura dentro de un área metropolitana —un grupo de
edificios céntricos, por ejemplo—, o una cualquier zona extensa (zonas rurales
o un campus universitario).
·
Wireless Wide Area Network (WWAN): Una red
inalámbrica de área extensa ofrece una de cobertura más extensa que todas
las redes inalámbricas. Las empresas de telefonía móvil se sirven de este tipo
de redes para poder ofrecer sus servicios, y establecer conexiones entre sus
usuarios.

Tecnologías inalámbricas
Existen diferentes tecnologías inalámbricas capaces de
generar redes inalámbricas para conectar dispositivos de todo tipo. A
continuación se describen algunos de los tipos de tecnologías inalámbricas
más importantes:
·
Wi-Fi: Es una red que permite la interconexión
inalámbrica con un adaptador inalámbrico y un router. El Wi-Fi es especialmente
popular en áreas domésticas para conectar varios dispositivos a internet.
·
Wi-max: Similar al funcionamiento de la red
Wi-fi, con transmisión de ondas microondas capaz de alcanzar una cobertura de
hasta 70km. Además, permite la recepción de datos por microondas y
retransmisión por ondas de radio.
·
Bluetooth: Hace posible transmitir datos y voz
entre distintos dispositivos (por ejemplo, de teléfono a teléfono) mediante un
enlace por radiofrecuencia. Cuenta con poca cobertura de emisión, por lo que
sólo se pueden conectar dispositivos que se encuentren dentro del rango de
alcance de la red Bluetooth.
·
Bluetooth-Le: Esta tecnología está destinada a
aplicaciones novedosas, y a diferencia del Bluetooth clásico, esta consume
mucha menos energía. Incluso, permite desplegar redes inalámbricas de área
personal, por lo que se pueden vincular dispositivos sin cables de por medio.
·
Li-Fi: Es una nueva conexión inalámbrica que
utiliza bombillas LED insertadas en un decodificador. Mediante estas, se
establece una conexión transmitida a través de luz visible. Cabe destacar que
puede llegar a ser hasta 100 veces más eficiente que una red Wi-Fi.
Tecnologías inalámbricas de telefonía
Engloba las tecnologías de comunicación inalámbrica
utilizadas por los teléfonos celulares modernos. Las más más utilizadas en la
actualidad son:
·
Red 4G: Es utilizada para transmitir datos
y navegar por internet a alta velocidad, desde la comodidad de un dispositivo
portátil, o móvil.
·
Red 5G: Esta generación de tecnología
inalámbrica precisa tres gamas de frecuencias fundamentales: por debajo de 1
GHz, entre 1 y 6 GHz y por encima de 6 GHz. Además, pretende establecer un
estándar de transferencia de datos de hasta 1 Gbps.
Tecnología inalámbrica de automatización
Las dos tecnologías inalámbricas de automatización más
usadas son:
·
Zigbee: Es un sistema de comunicación
inalámbrica enfocado en la comunicación de dispositivos con una baja tasa de
datos, lo que ayuda disminuir el consumo eléctrico.
·
Z-wave: Se trata de una red que utiliza
ondas de radio. Esta permite el controlar inalámbricamente electrodomésticos y
otros dispositivos.
Disco duro
Los discos duros son dispositivos de
almacenamiento de datos en los que podemos almacenar cualquier tipo de
información digital. Ya sean fotografías, vídeos, archivos de texto o programas
informáticos, el disco duro es una de las partes más importantes de cualquier
sistema informático.
Desde que aparecieron los primeros discos duros en 1956 la
tecnología de almacenamiento de datos ha evolucionado a pasos agigantados,
aunque su funcionamiento sigue fiel a las bases de los primeros discos duros.

Cómo funciona realmente un disco duro
El funcionamiento de un disco duro es «sencillo»,
los cabezales ponen marcas magnéticas a lo largo de las pistas del plato con 3
posiciones diferentes, 1, 0 ó neutro y los sistemas informáticos son capaces de
interpretar ese código binario como información. Cuando guardamos un archivo en
nuestro disco duro, éste escribe en los platos una secuencia de unos y ceros a
velocidades que se miden en microsegundos.
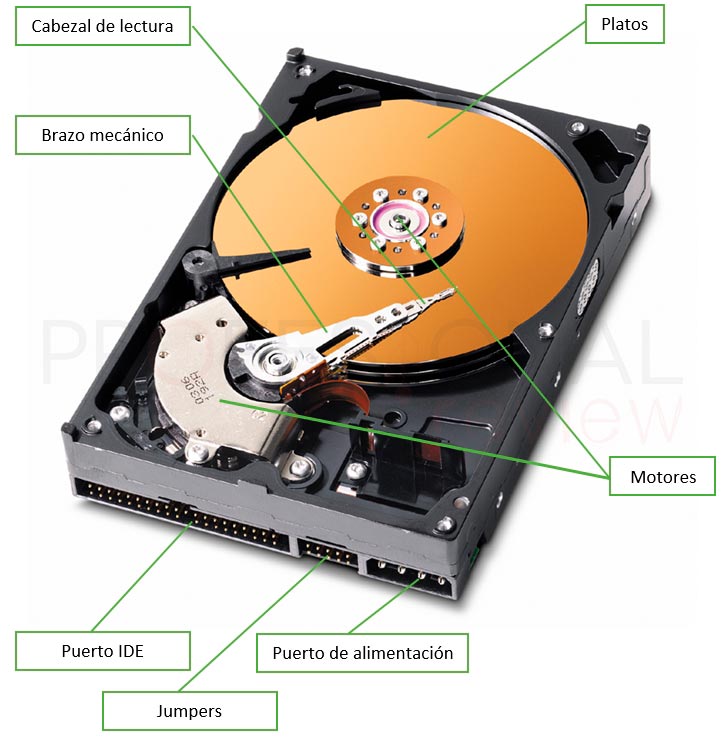
Estructura física de un disco duro
Un disco duro cuenta con varios componentes internos tales
como el plato, las agujas de lectura, la carcasa exterior etc… aquí os dejamos
un listado con las distintas partes y su explicación:
·
Plato: se llama plato a cada uno de los
discos que componen un disco duro que pueden ser de 1 único plato, 2 platos o
incluso modelos de 4 platos
·
Cara: Cada uno de los platos, tiene 2
caras.
·
Cabezal: el cabezal es el que se encarga de
la lectura y escritura sobre los platos
· Pista: una pista es una de las circunferencias que recorren el disco en las cuales se guardan los datos dentro de los platos.
Tamaños de discos duros:
Han existido muchos tamaños de disco duro, pero actualmente
se utilizan sobre todo 2 tamaños, 2.5″ para discos duros de portátil y
3.5″ para discos duros de ordenador, cajas externas incluso servidores
NAS.
En la imagen superior podemos ver dos discos duros, el
grande es un disco duro de 3.5″ y el pequeño, uno de 2.5″.

Capacidad de un disco duro
Las capacidades de los discos duros han llegado hasta los
6TB actualmente, capacidad que supera con creces los primeros modelos que
surgieron de forma comercial en los que no cabría ni si quiera una foto hecha
con un SmartPhone actual.
En un disco duro de 6TB podemos almacenar hasta
1.600.000 fotografías o 615 horas de vídeo y hasta 2.000.000 de canciones, un
almacenamiento más que suficiente para la mayoría de los usuarios del planeta.
Cómo curiosidad, podemos encontrar centros de datos que
almacenan más de 10 Exabytes en sus servidores. Si cuando has leído lo de
Exabytes te has quedado como yo me quedé por primera vez, vamos a contar juntos
cuanto es 1 Exhabyte
1 Gigabyte = 1024 Megabytes
1 Petabyte = 1000 Terabytes
1 Exabyte = 1000 Petabytes
Referencias:https://concepto.de/historia-de-la-computadora/
https://www.diferenciador.com/tipos-de-computadoras/#:~:text=Existen%20diferentes%20tipos%20de%20computadoras,%2C%20digitales%2C%20h%C3%ADbridas%20o%20cu%C3%A1nticas.https://conceptoabc.com/bus-de-datos/
https://es.theastrologypage.com/control-bus
https://es.theastrologypage.com/address-bus
https://concepto.de/procesador/
https://concepto.de/memoria-ram/
https://ayudaleyprotecciondatos.es/2020/07/23/memoria-cache/
https://www.profesionalreview.com/guias/bios/
https://hardzone.es/tutoriales/componentes/puertos-entrada-salida/
https://techlandia.com/tipos-dispositivos-almacenamiento-secundario-hechos_39843/

No hay comentarios.:
Publicar un comentario